モビリティソリューション
株式会社PALTEK > ソリューション事業 > モビリティソリューション > モビリティソリューション 一覧 > 超小型ビークル/バッテリ シミュレータ「白虎」| モビリティソリューション > ビークルシミュレータ
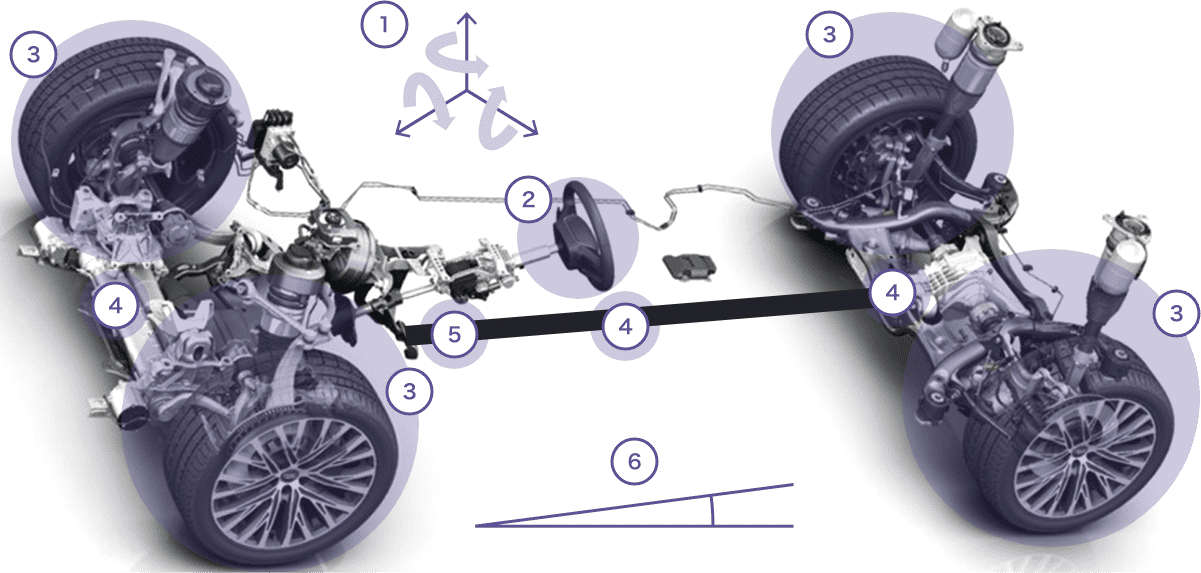
ビークルシミュレータ
| モデル概要 |
|
||
|---|---|---|---|
| モデル提供 | 株式会社ネクスティエレクトロニクス | 所在地 | 東京都港区、愛知県名古屋市 |
当モデルを「白虎」に実装した場合

特長
簡易ドライバモデルが搭載されているので、車両の挙動を使用した制御検証を目標車速や目標ハンドル角の入力によって簡単に行うことが可能です。また駆動トルクやブレーキ力などを個別に直接入力して使用することも可能です。
入出力パラメータ例
| 入力変数 | 出力変数 | ||||||
|---|---|---|---|---|---|---|---|
| 項目 | 変数の種類 | 単位 | 項目 | 変数の種類 | 単位 | ||
| 全体 | 直接入力/簡易ドライバの選択 | - | ① | 車両 | 車速、前後、左右の加速度 | km/n,G | |
| ① | 車両/簡 | 目標車速 | km/h | ロール、ピッチ、ヨーレート | deg,rad/s | ||
| ② | ステアリング/簡 | 目標ハンドル | deg | スリップ角 | rad | ||
| ステアリング/簡 | ハンドル角 | deg | ③ | タイヤ・車輪 | 車輪回転数 | rpm | |
| ③ | タイヤ・車輪 | ブレーキ力 | N | コーナリングフォース | N | ||
| ④ | デフ | 前後・センターデフのトルク配分 | - | 駆動トルク、制動力 | Nm,N | ||
| ⑤ | トランスミッション 出力/直 |
駆動トルク | Nm | サスペンション | 伸縮の変位 | m | |
| ⑥ | 外部環境 | 坂道の勾配 | % | ⑤ | トランスミッション 出力軸 |
回転数 | rpm |
| 入力変数 | 出力変数 | ||||
|---|---|---|---|---|---|
| 項目 | 変数の種類 | 項目 | 変数の種類 | ||
| ① | 車両 | ドライバとパワトレの駆動・制動遅れ | ② | ステアリング | 舵角特性のマップ |
| ホイールベース、スレッド | ③ | タイヤ・車輪 | ホイールベース、スレッド | ||
| 質量、イナーシャ | 質量、イナーシャ | ||||
| 前面投影面積 | サスペンション | バネ・タンパ係数 | |||
| ② | ステアリング | ステアリングのギア比 | ④ | デフ | 前後・センターデフのギア比 |
| ドライバのハンドル操作遅れ | ⑥ | 外部環境 | 空気抵抗係数、空気密度、路面µ | ||
ご相談・ご質問は
お気軽にどうぞ。
