モビリティソリューション
MILS 設計プロセス向けプラントモデル
IAT社 Mathworks® MATLAB®/Simulink® EVモデル
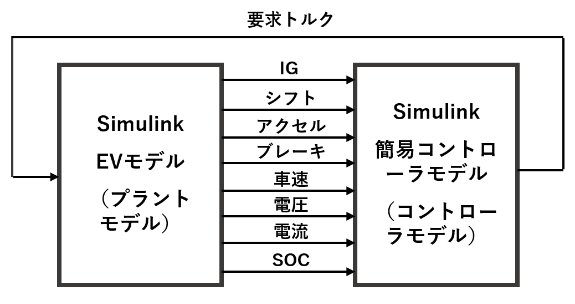
株式会社IATで開発したSimulink® EVモデルは1Dシミュレーションに最適なモデルで、モータやバッテリ特性、そして車両仕様のパラメータを設定頂くことで、電費、航続距離、動力性能の車両性能のシミュレーションが手軽に行えます。モデルには、自らコントローラモデルを用意しなくても MILS (MODEL in the Loop Simulation) が行えるように、簡易コントローラモデルも付属しています。
NEDC、WLTC、JC08、LA4など8種類の走行モード(時間毎の目標車速)を内蔵しており、IGキー 、シフト、アクセル 、ブレーキをAIドライバが操作、簡易コントローラモデルで要求トルクを演算し、EVモデルが車速、電圧、電流、SOCを演算して走行シミュレーションを行います。
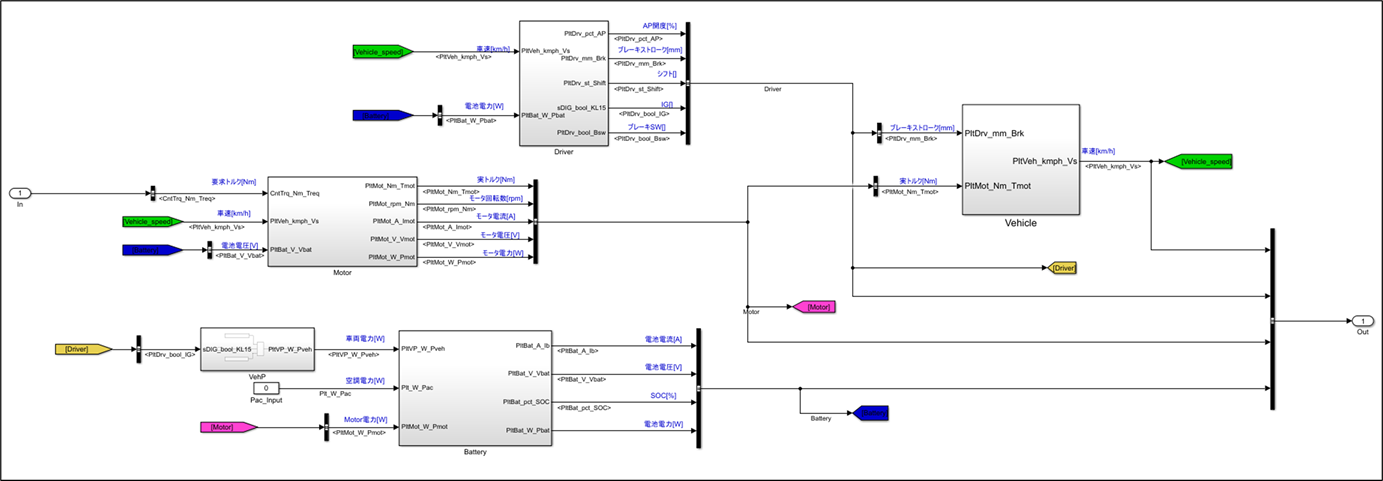
- EVモデルは4つのサブシステムから構成
-
- モータモデル
- バッテリモデル
- ドライバモデル
- ビークルモデル
| モデル | 入力 | 出力 | 仕様 |
|---|---|---|---|
| モータモデル | 要求トルク 車速 |
消費(発電)電力 実トルク |
要求トルクとモータ回転速度からモータの消費(発電)電力を算出する。 |
| バッテリモデル | 放電(充電)電力 初期SOC |
電池電圧 電池電流 SOC |
放電(充電)電力から、電圧と電流とSOCを算出 |
| ドライバモデル | 車速 | IGキー シフト位置 アクセル開度 ブレーキストローク |
左の4つを手動で操作する他、モード走行で目標車速となるようにAIドライバーが操作 |
| ビークルモデル | モータトルク ブレーキストローク 勾配 |
車両速度 | 駆動(回生)力、走行抵抗、ブレーキ力、勾配から加速度を計算し、積算し、車両速度を算出 |
EVモデルは4つのサブシステムから構成されています。
この4つの振る舞いを示す物理式についての解説書が付属し、お客様ご自身でモデル内容の改造も可能なので社内教育などにも活用していただけます。
特長
- MathWorks社 Simulink® で使用できる
電気自動車のプラントモデル
- お客様の車両仕様は
Microsoft Excel®で簡単に設定可能
- 簡易コントローラモデルも付属
- カスタマイズ可能
一般的な使用例
- 付属の簡易コントローラモデルを使用し、モード走行で電費を予測する場合
-
- ExcelのEVモデルの車両パラメータを、お客様の車両の仕様に合わせて内容を変更
- EVモデルの車両パラメータをMATLAB®ワークスペースに反映
- 簡易コントローラモデルの制御パラメータをMATLAB®ワークスペースに反映
- MILSモデルを起動
- 走行したいモードを選択
- MILSを実行。終了すれば電費などの情報が表示
本モデルの対象者
- 開発中のEVの電費性能、航続距離、動力性能の予測
- EVのモータやバッテリの特性の電費、動力性能等への影響の比較検討
- 車両仕様(重量、走行抵抗)の電費、動力性能等への影響の比較検討
- 開発中のコントローラの制御内容(回生制御等)の性能予測、検証
- EVモデルをカスタマイズしての性能予測

- 株式会社IATについて
- 株式会社IATは、本社を中国の北京におき、自動車の開発エンジニアリング業務を行っております。
IATグループとして約1700名の技術者が在籍し、企画、デザイン、設計、CAE、試作、試験、生産技術等、自動車メーカーが行う開発の全プロセスに対応可能です。
日本支社では、自動車や部品システムの開発経験を持つ各分野の技術者が、グループで推進中のプロジェクトの技術支援を行うとともに、日本国内のお客様への技術サービスを提供しております。
関連製品のご案内
白虎は、設定や操作がかんたんな超小型HILSです。自動運転車・電動化やEV開発用途に最適です。
MODEL CUBEは、リアルタイム処理の課題をハードウェア化することで解決したリアルタイムシミュレータです。
ご相談・ご質問は
お気軽にどうぞ。
