Mobility solution


Vehicle dynamics HIL simulation
| Model overview |
|
||
|---|---|---|---|
| Model offer | NEXTY Electronics Corporation. | location | Minato-ku, Tokyo and Nagoya City, Aichi prefecture |
When this model is implemented in "Byakko" (White Tiger)

Features
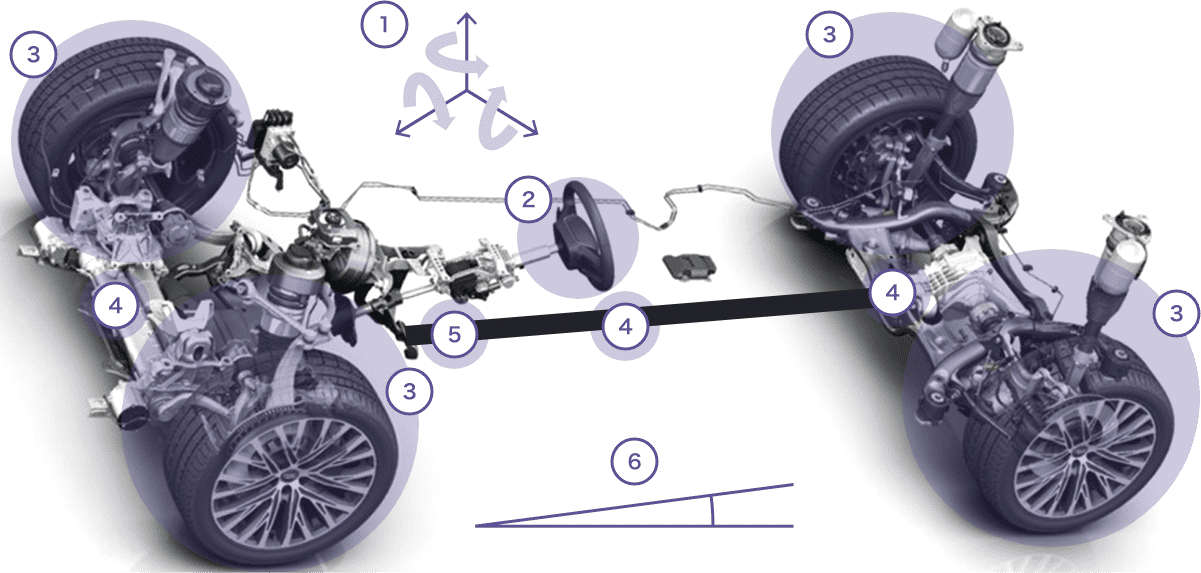
Since a simple driver model is installed, control verification using vehicle behavior can be simply performed by inputting the target vehicle speed and target steering wheel angle. It is also possible to directly input and use the driving torque and braking force individually.
Input/output parameters
| Input variable | Output variable | ||||||
|---|---|---|---|---|---|---|---|
| item | Variable type | unit | item | Variable type | unit | ||
| The entire | Direct input/simple driver selection | - | ① | Vehicle | Vehicle speed, front-rear, left-right acceleration | km/n,G | |
| ① | Vehicle | Target vehicle speed | km/h | Roll, pitch, yaw rate | deg,rad/s | ||
| ② | Steering | Target handle | deg | Slip angle | rad | ||
| Steering | Steering wheel rotation | deg | ③ | Tires/wheels | Wheel rotation axis | rpm | |
| ③ | Tires/wheels | Braking force | N | Cornering force | N | ||
| ④ | Differential | Front-rear/center differential torque distribution | - | Driving torque, braking force | Nm,N | ||
| ⑤ | Transmission output/direct |
Drive torque | Nm | suspension | Stretch displacement | m | |
| ⑥ | External environment | Slope level | % | ⑤ | Transmission output shaft |
Number of rotations | rpm |
| Input variable | Output variable | ||||
|---|---|---|---|---|---|
| item | Variable type | item | Variable type | ||
| ① | Vehicle | Driver/powertrain drive, braking delay | ② | Steering | Snake angle characteristics map |
| Wheel base, thread | ③ | Tires/wheels | Wheel base, thread | ||
| Mass, inertia | Mass, inertia | ||||
| Front projection area | Suspension | Spring/tamper coefficient | |||
| ② | Steering | Steering gear ratio | ④ | Differential | Front-rear/center differential gear ratio |
| Driver's handle operation delay | ⑥ | External environment | Air resistance coefficient, air density, road surface µ | ||
Inquiries

+81-3-5479-7022Reception hours: 9:00 to 17:00 (excluding weekends and holidays)
To Mobility Business Division