METI「電気自動車電費モデル」を調べてみた

民間団体が車両先行開発の効率化のため実機を使用せずに車両全体をシミュレーションで評価できるよう、経済産業省(METI)が平成28年度以降「車両性能シミュレーションモデル」をリリースし、順次モデルの拡充、アップデートを重ね、モデルの普及促進により次世代自動車の開発加速を進めています。
このTECHブログでは、この「車両性能シミュレーションモデル」の中で、2020年3月にリリースされた「電気自動車電費モデル」について調べてみました。
参考文献[1]
目次
METI「車両シミュレーションモデル」の指針
METI「車両シミュレーションモデル」の指針として以下のものがあげられます。
- ■ 産産間(自動車メーカーと部品メーカー、部品メーカー間)及び産学間でモデルを流通
- ■ モデル間のインターフェースを定義づけた「ガイドライン」を作成
- ■ 「ガイドライン」を具現化した、「車両性能シミュレーションモデル」を作成し、ステークホルダ間での流通時に共通基盤となること
これらより車両評価性能モデルの普及促進を図り、次世代自動車の開発加速化を狙っています。
「電気自動車電費モデル」
「電気自動車電費モデル」は上記指針に則り、電気自動車の電費を評価するためにMATLAB® Simulink®をベースに作成されたモデルです。走行環境設定が様々用意されており、モード走行データ、諸元データ等を入力設定情報として読み込み、シミュレーションを行うことができます。
モード走行パターン(JC08,WLTC)を選択し、アクセルとブレーキの操作量をドライバ モデルで算出し、車両モデル(Vehicle)はその操作を受けて加減速を始めとした挙動を計算します。車両速度等の情報はドライバ モデルへ渡され、アクセルとブレーキ操作量の算出に用いられます。
図 1のように車両モデル(Vehicle)には様々なサブシステムが含まれています。
(詳細は次項「Vehicleを構成するサブシステム」でふれます。)
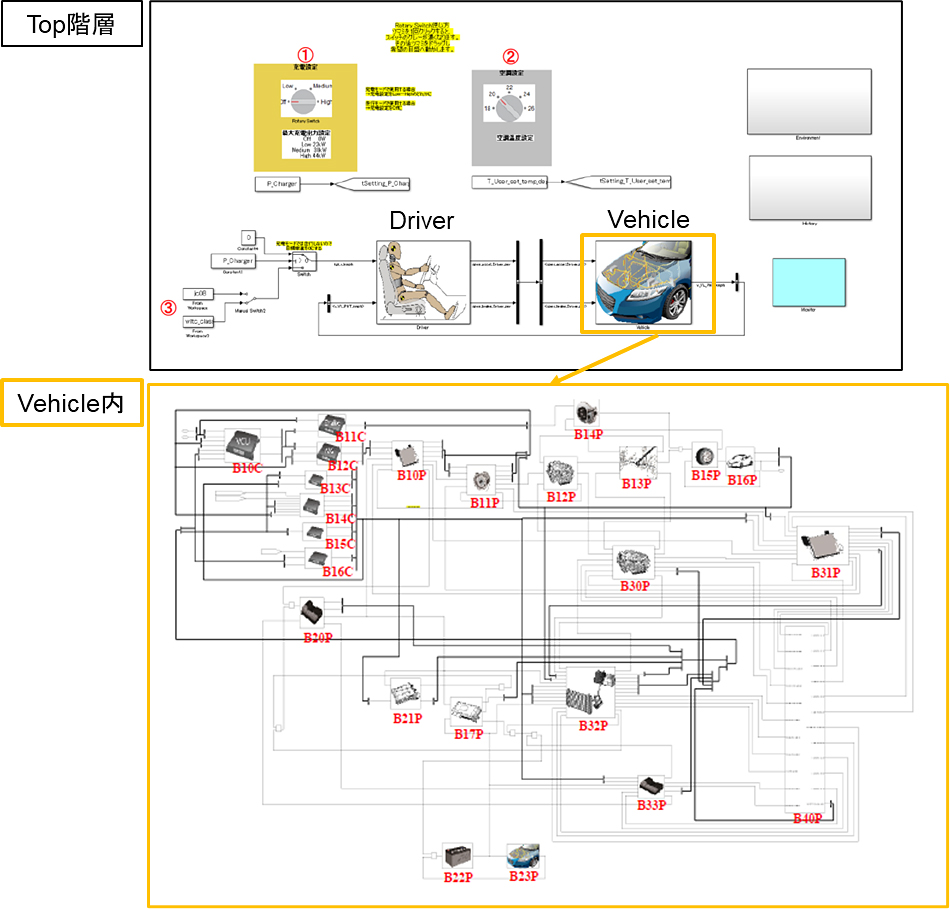
図 1 METI「電気自動車電費モデル」構成
出典:自動車開発におけるプラントモデル I/F ガイドライン準拠モデル(電気自動車用電費モデル)解説書,P12・19
https://epc.or.jp/wp-content/uploads/2020/03/EVthermalCabin_IFguidelines_Manual_Simulink_ver.1.0.pdf
(参照日 2021/10/28)
Vehicleを構成するサブシステム
Vehicleは表 1のようにコントロールモデルが7ブロック、プラントモデルが17ブロックから構成されています。橙色枠で囲われたものは熱に関連したモデルです。

表 1 Vehicleを構成するサブシステム
出典:自動車開発におけるプラントモデル I/F ガイドライン準拠モデル(電気自動車用電費モデル)解説書,p20
https://epc.or.jp/wp-content/uploads/2020/03/EVthermalCabin_IFguidelines_Manual_Simulink_ver.1.0.pdf
(参照日 2021/10/28)
電費評価時の走行環境設定
「電気自動車電費モデル」では電費評価時の走行環境設定項目として図 2の設定が可能です。これらの設定を変えることで様々な条件下での電費評価を行うことが可能です。
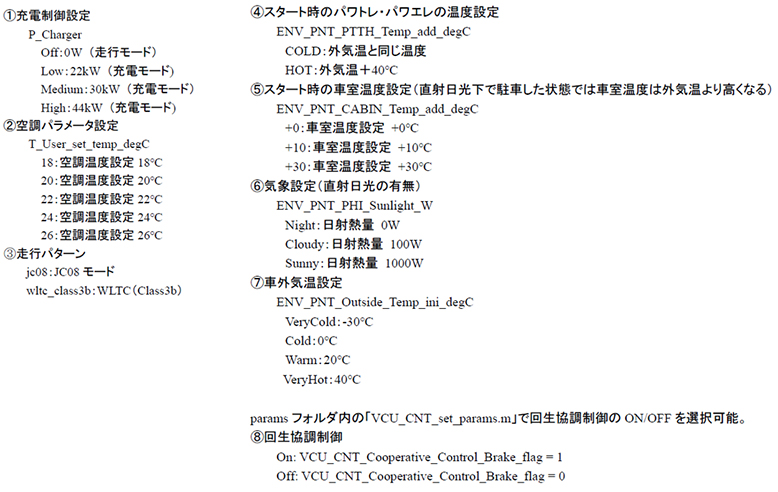
図 2 走行環境設定項目
出典:自動車開発におけるプラントモデル I/F ガイドライン準拠モデル(電気自動車用電費モデル)解説書,P13
https://epc.or.jp/wp-content/uploads/2020/03/EVthermalCabin_IFguidelines_Manual_Simulink_ver.1.0.pdf
(参照日 2021/10/28)
パラメータの設定/変更方法
シミュレーションを実行するに際してのパラメータ設定/変更方法には設定項目によって2タイプの方法があります。
多くのパラメータはmファイル(init_setting.m他)を読込んで設定を行います。
パラメータの変更時は、mファイルを変更し再読み込みすることで対応します。
もう一つのタイプは、走行環境設定の多くで使用する、図 3のSimulink®モデル上のRotary Switchにより設定するものです。
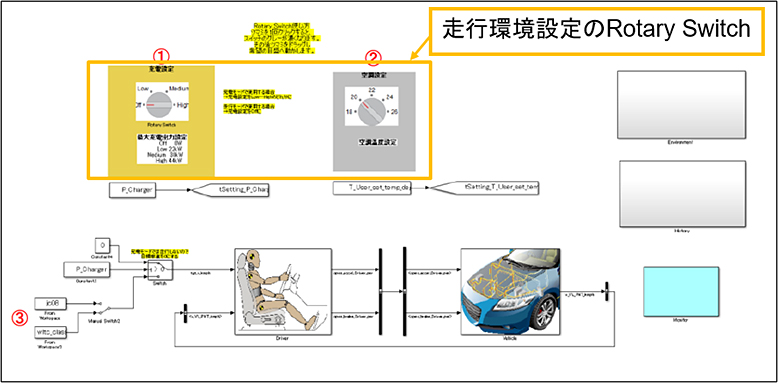
図 3 走行環境設定のRotary Switch
出典:自動車開発におけるプラントモデル I/F ガイドライン準拠モデル(電気自動車用電費モデル)解説書,P12
https://epc.or.jp/wp-content/uploads/2020/03/EVthermalCabin_IFguidelines_Manual_Simulink_ver.1.0.pdf
(参照日 2021/10/28)
波形表示
図 4に示すようにTop階層に波形表示のためのMonitorブロックがあり、DriverやVehicleブロックで演算された様々な信号をモニターできます。
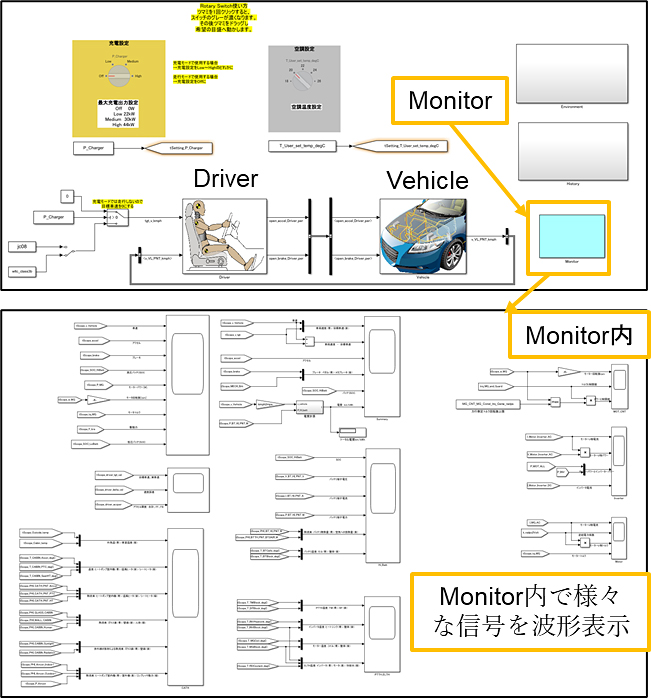
図 4 波形表示
出典:自動車開発におけるプラントモデル I/F ガイドライン準拠モデル(電気自動車用電費モデル)解説書,P12・22
https://epc.or.jp/wp-content/uploads/2020/03/EVthermalCabin_IFguidelines_Manual_Simulink_ver.1.0.pdf
(参照日 2021/10/28)
車速、アクセル・ブレーキ、バッテリSOC、バッテリ電力、電費などが図 5のように表示できます。
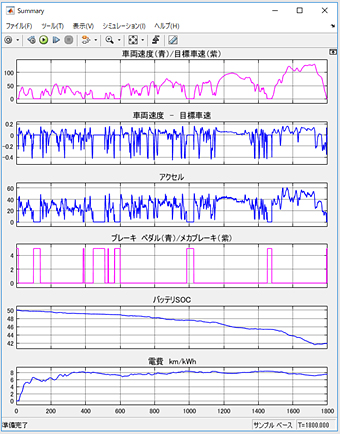
図 5 波形表示の一部例
出典:平成31年度「次世代自動車等の開発加速化に係るシミュレーション基盤構築事業費補助金」に係る
「ガイドライン」と 「車両性能シミュレーションモデル」の公開について,電気自動車電費モデル
https://epc.or.jp/fund_dept/sim_foundation/2019model
(参照日 2021/10/28)
モデル解説書
モデル化された各サブシステムの機能概要、入出力仕様、パラメータ仕様などが掲載された「自動車開発におけるプラントモデルI/Fガイドライン準拠モデル(電気自動車用電費モデル )解説書」が用意されています。
モデルの詳細について調べたい場合はこの解説書をみることで知ることができます。
参考文献[2]を参照。
終わりに
今回はMETIが、車両評価性能モデルの普及促進を図り次世代自動車の開発加速化を狙ってリリースした、「電気自動車電費モデル」について調べてみました。
MATLAB® Simulink® をベースに作成された、電気自動車の電費を評価するモデルです。
走行環境設定が様々用意されており、異なる条件下での電費評価が可能です。
車両モデル(Vehicle)は細かくサブシステム化され、コントロールモデルが7ブロック、プラントモデルが17ブロックから構成されています。機械的、電気的に関するモデルのみではなく熱に関するモデルも含まれています。
シミュレーションに際しては、パラメータ設定をmファイル、Simulink® モデル上のRotary Switchで設定行い、車速、アクセル・ブレーキ、バッテリSOC、バッテリ電力、電費を始めとした様々な信号の波形確認が可能です。
弊社では、モデルベースデザイン設計委託やお手元にあるSimulink® モデルのHDL化のご依頼を承っております。弊社ソリューション事業までお気軽にお問い合わせください。
最後までお付き合いいただきありがとうございました。