【Vivado®で使用するXDCファイルの基本的な記述例】第2回 コンフィグレーション設定、タイミング設定編

このブログでは、Vivado® ML EditionsおよびVivado® design Suite(以下「Vivado」といいます)で使用する、「XDCファイル」の基本的な記述について解説します。
XDCとは、Xilinx Design Constraint(頭文字)の略です。
XDCファイルとは、Xilinx社のFPGA及び適応型SoCに対して制約を与えることができるファイルで、以下の項目の制約設定が可能です。
- ・端子配置設定
- ・クロック設定
- ・コンフィグレーション設定
- ・タイミング設定 など
前回は、端子配置設定の中の「端子配置設定」、「クロック設定」についてお話しました。
前回のブログは コチラ をご覧ください。
第2回では、「コンフィグレーション設定の方法」と「タイミング設定」を説明します。
このブログは「FPGA設計ブログ一覧」の
4. インプリメント(配置配線)のひとつです。
目次
コンフィグレーション設定
CCLKの公称周波数の設定をします。(推奨:33)
set_property BITSTREAM.CONFIG.CONFIGRATE 33 [current_design]SPIフラッシュのSPIのバス幅の設定をします。(推奨:4)
set_property BITSTREAM.CONFIG.SPI_BUSWIDTH 4 [current_design]以下の設定を行わなかった場合は、周波数3MHz、SPIビット幅1bitとなり、FPGAの起動に時間がかかってしまいます。※最大周波数→66MHz
set_property BITSTREAM.CONFIG.CONFIGRATE 33 [current_design]
set_property BITSTREAM.CONFIG.SPI_BUSWIDTH 4 [current_design]以下は、Bank0のVCCIO電圧の設定です。
VCCIO=1.8Vの場合、CFGBVS→GND
VCCIO=2.5V or 3.3Vの場合、CFGBVS→VCCO の設定とします。
本記述は、なしでも動作します。
set_property CONFIG_VOLTAGE <1.8 2.5 3.3> [current_design]
set_property CFGBVS <GND / VCCO> [current_design]MIGなど、IPを生成した場合、XDCは自動生成されているため、記述する必要はありません。
タイミング設定
入力遅延
入力ポートでのデータ遅延時間を設定
set_input_delay -clock {クロック} -max 最大遅延 [get_ports 信号名]
set_input_delay -clock {クロック} -min 最小遅延 [get_ports 信号名]| クロック | 基準となるクロック |
| 最大遅延 | クロックエッジ後にデータが到達する最大時間→Setupの制約 |
| 最小遅延 | クロックエッジ後にデータが到達する最小時間→Holdの制約 |
| 信号名 | 対象となる信号名 |
出力遅延
出力ポートでのデータ遅延時間を設定
set_output_delay -clock {クロック} -max 最大遅延 [get_ports 信号名]
set_output_delay -clock {クロック} -min 最小遅延 [get_ports 信号名]| クロック | 基準となるクロック |
| 最大遅延 | クロックエッジ後にデータが必要とする最大時間→Setupの制約 |
| 最小遅延 | クロックエッジ後にデータが必要とする最小時間→Holdの制約 |
| 信号名 | 対象となる信号名 |
タイミング解析の除外
非同期入力をタイミング解析から除外するための設定
set_false_path [-from <node_list>] [-to <node_list>] [-through <node_list>]| -from | 始点のノー ド リ ス トを指定 |
| -to | 終点のノー ド リ ス トを指定 |
| -through | ”pin”、”port”、または”net”のノー ド リ ス ト を指定 |
例1) resetポートからすべてのレジスタへのタイミング解析の除外
set_false_path -from [get_port reset] -to [all_registers]例2) 2つの非同期クロックドメイン間(CLKAからCLKB)のタイ ミング解析の除外
set_false_path -from [get_clocks CLKA] -to [get_clocks CLKB]
set_false_path -from [get_clocks CLKB] -to [get_clocks CLKA]タイミング例外には、 set_false_path 以外に下記のコマンドがあります。
| コマンド | 機能 |
|---|---|
| set_multicycle_path | パスの開始点から終点までデータを伝搬させるのに必要なクロックサイクル数を指定します。 |
| set_max_delay set_min_delay |
最小パス遅延または最大パス遅延の値を指定します。 このコマンドを使用すると、デフォルトのセットアップおよびホールド制約ではなく、ユーザーが指定した最大/最小遅延値が使用されます。 |
マルチサイクルパス
- 同一クロック間で定義されるマルチサイクル
- 低速クロックから高速クロックへ定義されるマルチサイクル
- 高速クロックから低速クロックへ定義されるマルチサイクル
について記載します。
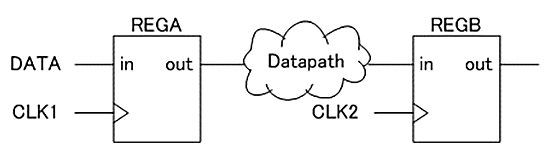
同一クロック間で定義されるマルチサイクル
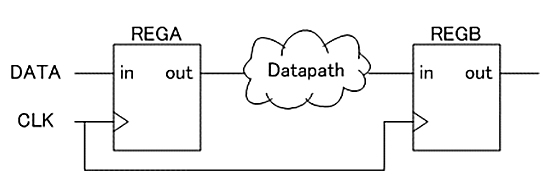
デフォルトのセットアップ/ホールドの関係を示します。
以下にコマンド例を示します。
set_multicycle_path n -setup -from [get_pins REGA/C] -to [get_pins REGB/D]
set_multicycle_path n-1 -hold -from [get_pins REGA/C] -to [get_pins REGB/D]
・セットアップの乗数を”2”に設定した場合
set_multicycle_path 2 -setup -from [get_pins REGA/C] -to [get_pins REGB/D]
set_multicycle_path 1 -hold -from [get_pins REGA/C] -to [get_pins REGB/D]となります。
・セットアップの乗数を”4”に設定した場合
set_multicycle_path 4 -setup -from [get_pins REGA/C] -to [get_pins REGB/D]
set_multicycle_path 3 -hold -from [get_pins REGA/C] -to [get_pins REGB/D]となります。
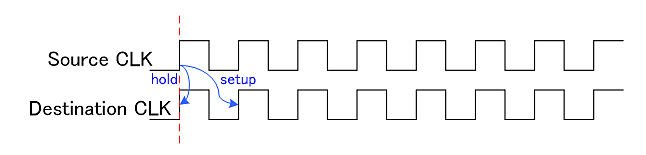
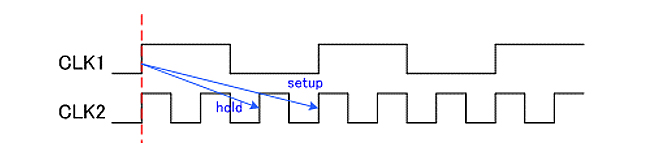
低速クロックから高速クロックへのマルチサイクル
・CLK2は、CLK1の3倍の周波数とした場合
デフォルトのセットアップ/ホールドの関係を示します。
set_multicycle_path n -setup -from [get_clocks CLK1] -to [get_clocks CLK2]
set_multicycle_path n-1 -hold -end -from [get_clocks CLK1] -to [get_clocks CLK2]
セットアップの乗数”n”に設定した場合、ホールドの乗数”n-1”をデスティネーションクロックに対して設定します。
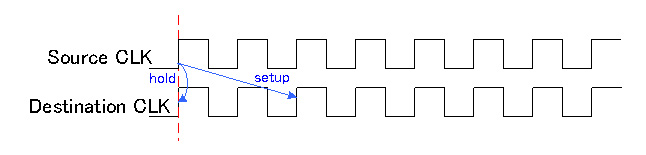
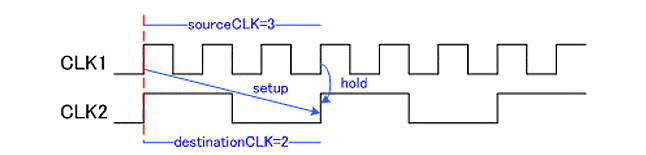
・セットアップの乗数を”3”に設定した場合
set_multicycle_path 3 -setup -from [get_clocks CLK1] -to [get_clocks CLK2]
set_multicycle_path 2 -hold -end -from [get_clocks CLK1] -to [get_clocks CLK2] となります。
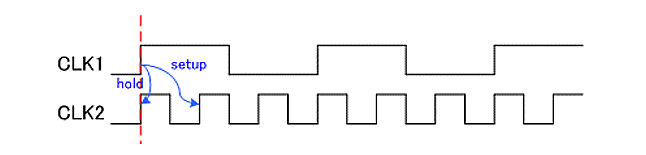
高速クロックから低速クロックへのマルチサイクル
・CLK2は、CLK1の1/3の周波数とした場合
デフォルトのセットアップ/ホールドの関係を示します。
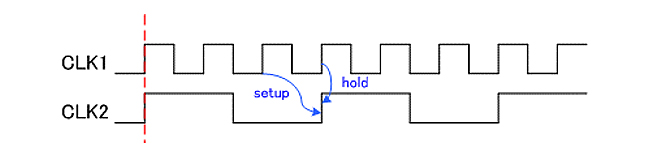
set_multicycle_path n -setup -start -from [get_clocks CLK1] -to [get_clocks CLK2]
set_multicycle_path n-1 -hold -from [get_clocks CLK1] -to [get_clocks CLK2]
セットアップの乗数”n”をソースクロックに対して設定し、ホールドの乗数”n-1” に設定します。
・セットアップの乗数を”3”に設定した場合
set_multicycle_path 3 -setup -start -from [get_clocks CLK1] -to [get_clocks CLK2]
set_multicycle_path 2 -hold -from [get_clocks CLK1] -to [get_clocks CLK2]となります。
最大/最小遅延
- 最大遅延:セットアップを変更する場合に使用します。
- 最小遅延:ホールドを変更する場合に使用します。
・最大遅延コマンド例
set_max_delay <delay> [-datapath_only] [-from<node_list> ]
[-to <node_list>] [-through <node_list>]・最小遅延コマンド例
set_min_delay <delay> [-from <node_list>]
[-to <node_list>] [-through <node_list>]
・オプション
| -datapath_only | →スラックの算出からクロックスキューを除外できる →set_max_delayのみサポート →ホールドは無視される |
| -from | →クロック、入力または入出力ポート |
| -to | →クロック、出力または入出力ポート |
| -through | →ピン、ポート 、またはネット |
入力または出力ロジックの制約
set_max_delay/set_min_delayコマンドは、入力または出力ロジックの制約に使用されません。
入力ポートと初段のロジック間は、set_input_delayコマンドを使用します。
終段のロジックと出力ポート間は、set_output_delayコマンドを使用します。
入力/出力ポートの間の組合せパス(in-to-out)ではset_max_delay/set_min_delayコマンドを使用します。
ここまでが基本的なタイミング設定になります。
XDCファイルは、VivadoのconstraintからGUI上で設定する場合、もしくはテキストファイルに直接記載することが可能です。
拡張子は、xdcとなります。
以上となります。
次回は、バススキュー制約、優先順位、物理的制約について解説します。
このブログは「FPGA設計ブログ一覧」の
4. インプリメント(配置配線)のひとつです。
最後までご覧いただきましてありがとうございました!
今回説明した内容でのご不明な点や、FPGA設計などでお困りのことなどがありましたら、下記よりお問い合わせください。