2慣性系の回転運動モデルをSimulink®で作ってみた

このブログでは、自動車業界で普及してきている、「モデルベース設計」を用いて、様々な物理現象をモデル化します。今回は2慣性系の回転運動をモデル化します。
このモデル作成は、物理モデルから微分方程式を導き、それを元にMathWorks社のSimulink®を使用してモデルを作成しておりシミュレーションによる評価を行う一連の流れを紹介します。
なお、実行した環境は以下の通りです。
| OS | Microsoft Windows 10 Pro |
|---|---|
| MathWorks社製 | MATLAB® バージョン 9.9 (R2020b) |
| Simulink® バージョン 10.2 (R2020b) |
目次
2慣性系の回転運動の物理モデル
2慣性系の回転運動の物理モデルを図1に示します。
物体1と物体2をバネ接手でつなぎ、各々に回転力τ1[Nm],τ2[Nm]を加えた時の時刻t[s]における角速度dθ1(t)/dt[rad/s],θ2(t)/dt[rad/s]をモデル化しています。
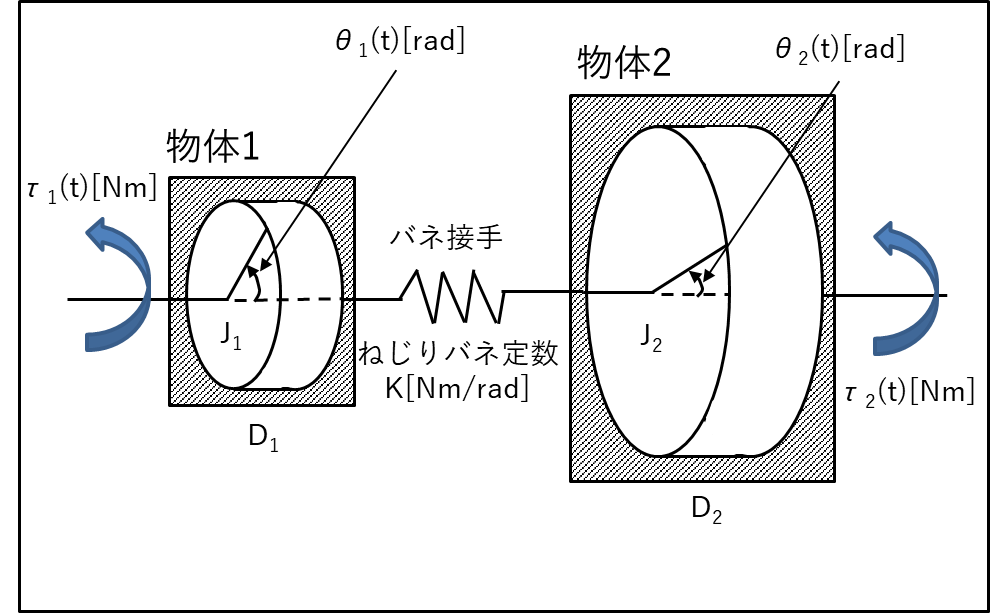
図1 2慣性系の回転運動の物理モデル
時間変動する物理量は以下の通りです。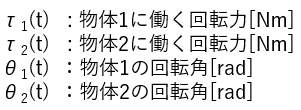
また、パラメータは以下です。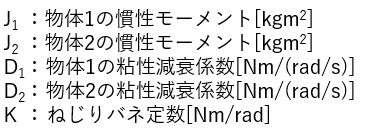
物理モデルを微分方程式へ
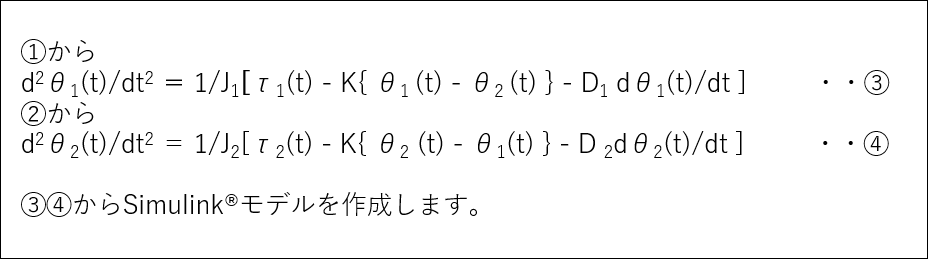
図1の物理モデルを微分方程式にしたものを以下に示します。

それぞれの式の意味は以下の通りです。
- ① 慣性モーメントJ1の物体1に回転力τ1(t)[Nm]を与えたときの回転運動方程式
- ② 慣性モーメントJ2の物体1に回転力τ2(t)[Nm]を与えたときの回転運動方程式
微分方程式をSimulink®モデルへ
回転力τ1(t)[Nm],τ2(t)[Nm]を入力、角速度dθ1(t)/dt[rad/s], dθ2(t)/dt[rad/s]を出力とするSimulink®モデルを作成します。
作成したものが、図2のモデルです。
※画像クリックで大きな画像が表示されます。
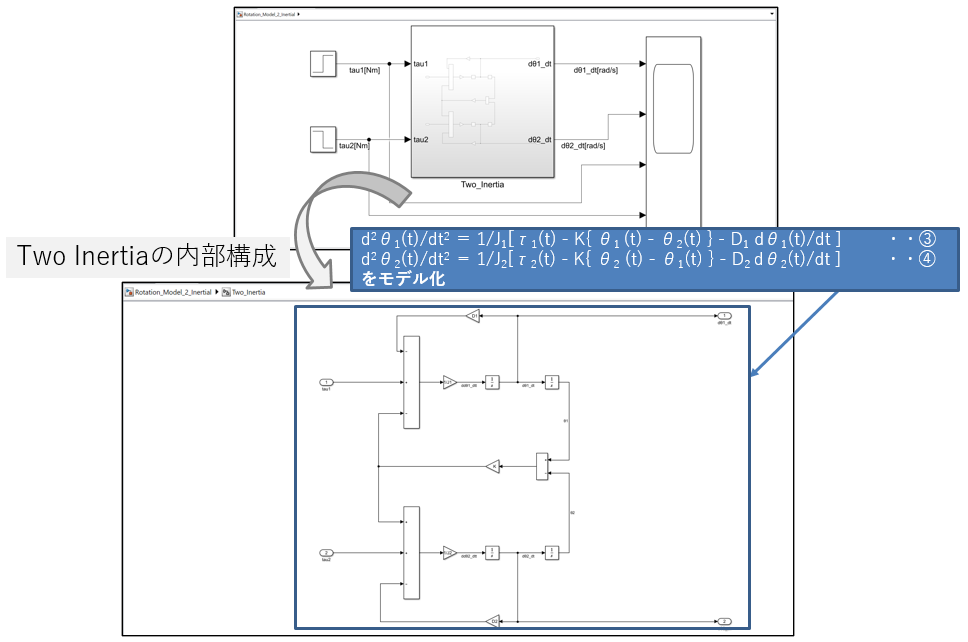
図2 2慣性系の回転運動のSimulink®モデル
シミュレーションによる評価
上記のモデルに以下図3のパラメータを設定して、図4入力のように2慣性系の回転運動モデルで時刻t=1[s]に回転力τ1=1[N]を、時刻t=10[s]に回転力τ2=-1[N]をステップ入力で与えて、シミュレーション実行して角速度dθ1/dt, dθ2/dtを評価しました。
シミュレーション結果は図4の通りです。
t=1[s]に回転力τ1=1[N]が加わるとともに角速度dθ1/dt, dθ2/dtは増加し始め、最大で20[rad/s]を超える角速度まで変化します。
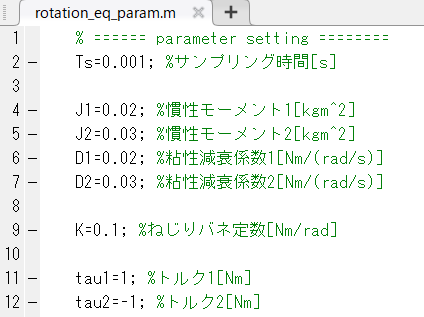
図3 設定パラメータ
※画像クリックで大きな画像が表示されます。
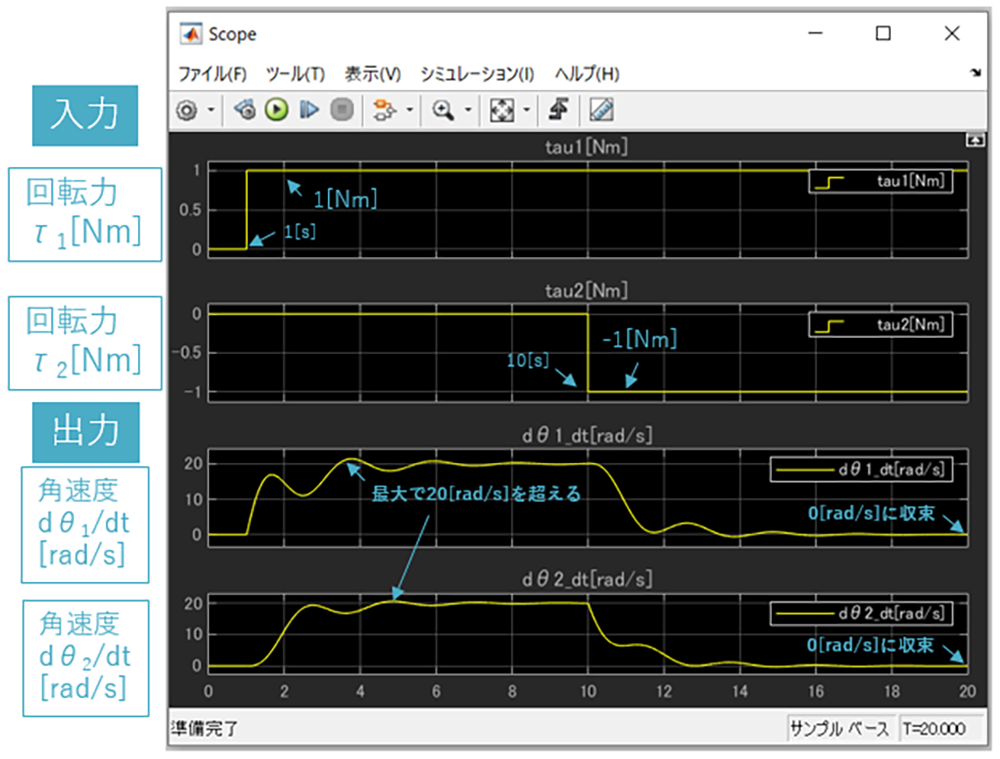
図4 2慣性系の回転運動のシミュレーションの様子
時刻t=10[s]に回転力τ2=-1[N]が加わると角速度dθ1/dt, dθ2/dtは減少し始め、 最終的には0[rad/s]に収束します。
おわりに
今回は「2慣性系の回転運動の角速度」について、物理モデルから微分方程式を導き、それを元にMathWorks社のSimulink®を使用してモデルを作成し、角速度の経時変化の様子をシミュレーションで確認しました。
もし、モデルベースデザイン設計委託やお手元にあるSimulink®モデルのHDL化のご要望がございましたら、弊社デザインサービス事業までお気軽にお問い合わせください。
最後までお付き合いいただきありがとうございました。
参考文献[1]:山本透 他, “実習で学ぶモデルベース開発”,コロナ社 (2018)