DCモータモデルをSimulink®で作ってみた
このTECHブログでは、自動車業界で普及してきているモデルベース開発を用いて、DCモータの評価を行うことができるモデルを作成します。
このモデル作成は、物理モデルから微分方程式を導き、それを元にMathWorks社のSimulink®を使用してモデルを作成しており、シミュレーションによる評価を行う一連の流れを紹介します。
なお、実行した環境は以下の通りです。
| OS | Microsoft Windows 10 Pro |
|---|---|
| MathWorks社製 | MATLAB® バージョン 9.8 (R2020a) |
| Simulink® バージョン 10.1 (R2020a) |
目次
DCモータの物理モデル
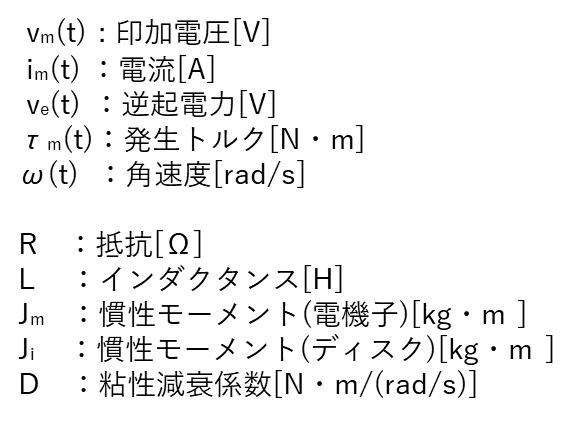
DCモータの物理モデルを図 1に示します。
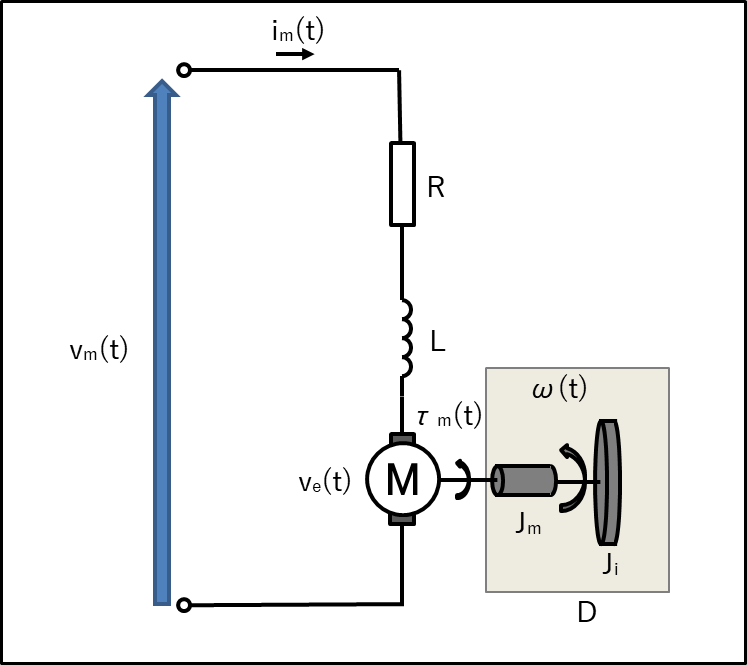
図 1 DCモータ等価回路モデル
各部の対応は以下の通りです。
物理モデルを微分方程式へ
図 1の物理モデルを微分方程式にしたものが以下の数式です。
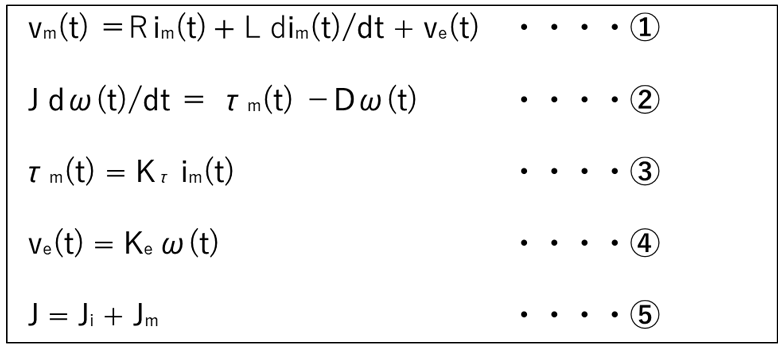

- ① :キルヒホッフの法則による回路方程式(電気的特性)から導出
- ② :回転体の運動方程式(機械的特性)から導出
- ③ :DCモータは電流に比例したトルクを発生する
- ④ :DCモータは回転速度に比例した起電力を発生する。
- ⑤ :慣性モーメントはディスクと電機子を足し合せて算出。
微分方程式をSimulink®モデルへ
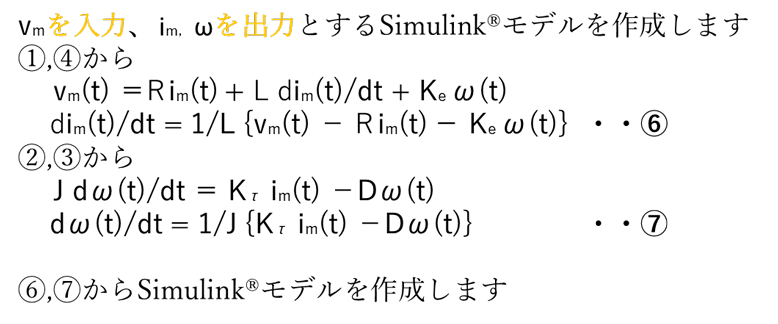
作成したものが、図 2のモデルです。
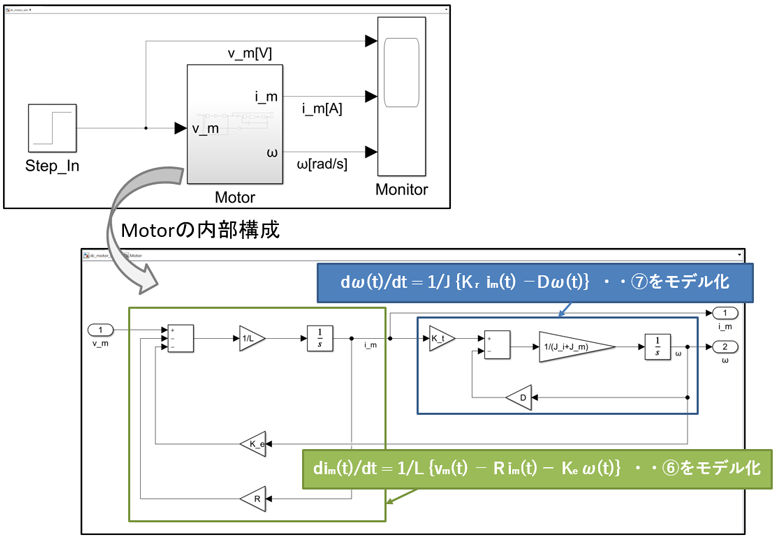
図 2 DCモータのSimulink®モデル
シミュレーションによる評価
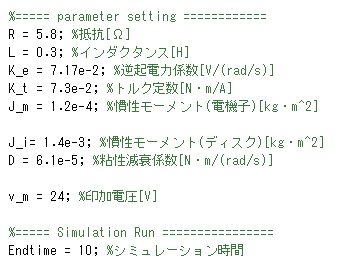
上記のモデルに下記パラメータを設定して図 3のように印加電圧v_m = 24[V]のステップ入力を与え、モータ電流i_m[A]、角速度ω[rad/s]の変化をシミュレーションで確認しました。
モータ電流i_m[A]は、電圧印加の直後に瞬間的に最大4[A]程度の電流が流れ、24[V]×4[A]=96[W]程度の電源容量が必要であることが分かります。また、角速度ω[rad/s]は、最大310[rad/s]に10[s]程度で到達します。
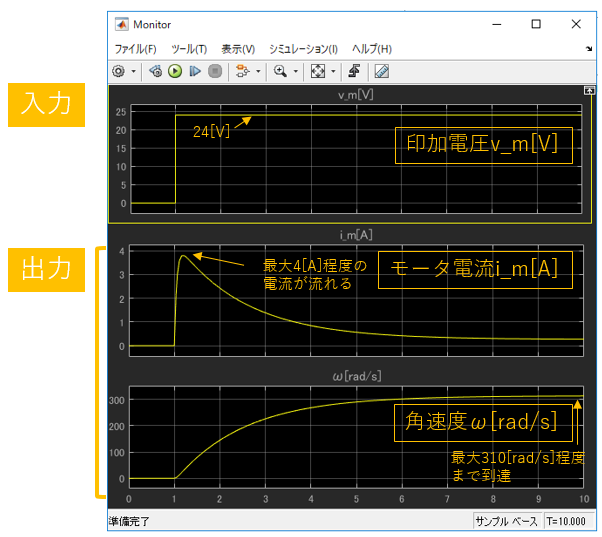
図 3 DCモータシミュレーションの様子
終わりに
今回はDCモータについて、物理モデルから微分方程式を導き、それを元にMathWorks社のSimulink®を使用してモデルを作成しました。
印加電圧v_m = 24[V]のステップ入力を与えた時のモータ電流i_m[A]、角速度ω[rad/s]の経時変化の様子をシミュレーションで確認し、96[W]程度の電源容量必要になること、モータ回転速度が10[s]程度で310[rad/s]になることが確認できました。
モデルベースデザイン設計委託やお手元にあるSimulink®モデルのHDL化のご要望がございましたら、お気軽にお問い合わせください。
最後までお付き合いいただきありがとうございました。